Convex Hull - Part 1
· 阅读需 4 分钟
这学期有幸选到了贵系邓俊辉老师的《计算几何》,这学期会随着课程进度更新一些笔记。
凸包
用邓老师的话来说,所谓凸包就是
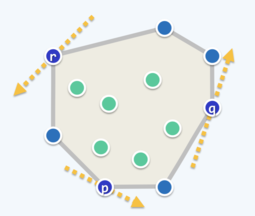
把点集看作钉在桌子上的若干钉子,这时撑开一个橡皮筋,让它能够囊括所有钉子,松手后橡皮筋围成的多边形就是该点集的凸包
当然这只是一个凸包在二维上的解释,但通俗易懂,如下图。
那么给定一个点集 ,如何��计算出其凸包 呢?接下来将介绍第一个计算凸包的算法 —— 极点法。
极点法(Extreme Points)
极点
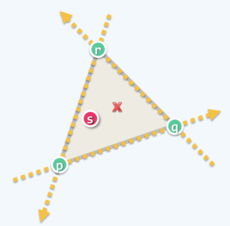
如下图,对于点集中的某个点,若存在一条经过该点的直线,使得点集中的其余点均处于该直线的一侧,则称该点为极点(Extreme Point)。
但根据上述定义很难实现凸包的构建算法,因为对于每个点都要遍历经过它的所有直线,而这些直线是无限的。
对于非极点来说,它必然会被点集中某三个点组成的三角形完全包围(不包括边界),而极点不满足该性质,如下图。
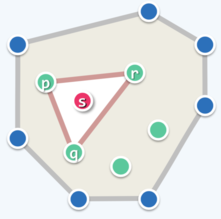
所以就可以遍历点集中的所有三角形,将其覆盖的所有点设置为非极点。通过排除所有的非极点就可以得到点集中的所有极点。 该算法的时间复杂度是 的。
那么如何判断点是否在三角形内呢?当然,可以使用射线法或累计角度法判定,但未免有些「杀鸡用牛刀」的意味。考虑边按逆时针排列的三角形,对于这三条有向边,若某点处于它们的左侧(toLeft 判断),则该点被该三角形覆盖,如下图。
通过计算有向面积()的符号能够判定某点是否在有向边的左侧:
在得到点集中的所有极点后,再对它们进行排序()就可以得到最终结果。
极点法虽然能够计算凸包,但还存在问题,其中最不能使人接受的是其较高的时间复杂度,之后将会介绍一些复杂度相对较低的算法。